|
|
|
|
|
|
|
|
 |
|
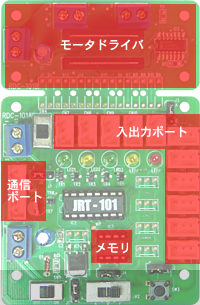
自律型ロボット/計測制御入門用コントローラボード
RDC-101 |
|
RDC-101コントローラボードは
・電源/モード/スタートの3つのスイッチ
・64Kbit I2Cメモリ(出荷時)
・状態表示LED(モータドライブ回路と共用)
・電源用コネクタ・通信用コネクタ
・デジタル/アナログ兼用入出力コネクタ・デジタル入出力コネクタ
・モータドライバ
・拡張コネクタから構成されています。 |
|
|
| ■入出力ポート |
| 入出力機器の接続方法は固定されていません。「ハードウェア設計支援システム」及びGUIソフト「Ticolla」と連動することにより柔軟に変更できます。入出力機器の接続にはデジタル/アナログ入出力コネクタ3個、デジタル入出力コネクタ2個、拡張コネクタ1個の6系統が準備されています(モータドライバ部を使用しない場合はデジタル/アナログ入出力コネクタ1個、デジタル入出力コネクタ4個の5系統を合わせて11系統の入出力機器が自由に接続変更可能となります)。 |
|
| ■モータドライバ |
ボード右側のモータドライバ部には正反転制御回路が2系統あり、コントローラからのPWM制御でモータのスピードをコントロールします。モータ用電源はDC4.5V〜27Vで、各モータ2Aまで使用可能ですから、模型用のDCモータからFA用モータまで幅広く使用することができます。使用するモータがハイパワーで電流を消費する場合には、ジャンパー線をカットすることで回路とモータの電源を分離することもできます。
モータドライバ部は、ロボットの構造に合わせて駆動部周辺に配置したい場合などに対応して、メインボードと簡単に切り離すことができるように設計されています。
また正反転・PWM制御信号は状態表示用LEDと連動しており、動作不調の原因究明が簡単に行えます。 |
|
| ■もうひとつの出力 |
| 拡張コネクタの1つにはあらかじめ基板上に搭載されたトランジスタドライブ回路が簡 単に使用できるよう設計してあります。回路はダーリントンのオープンコレクタで、モータやリレー等の駆動機器のON/OFF制御を行うことができます。 |
|
| ■メモリ |
| 出荷時に64Kbit I2Cメモリを搭載しているので、大きな動作プログラムでも十分な余裕があります。センサで計測したデータをメモリに記憶させておき、計測データをPC側へ送ることも可能です。計測データが多くて容量が足りない場合には、IC交換だけでメモリを増やすことができます。メモリを制御しているI2Cには外部接続用コネクタを準備してあるので、将来のソフトウェアバージョンアップで他のI2C機器接続やコントローラボード同士を複数枚接続しての通信制御等が可能となる予定です。 |
|
| ■通信ポート |
| 通信ボード(RS-232C)はコントローラボードと別基板になっています。PCとの通信時以外は取り外すことができ、通信基板から発生するノイズや不要な電力消費がありません。 |
|
| RDC-101 仕様 |
| メモリ |
ユーザーメモリ64Kbit(ソケットで交換可能) |
| 電源 |
回路部:DC6〜12V
モータドライバ部:4.5〜27V
※回路とモータドライバの電源は出荷時は共用となっています。入力端子はそれぞれ用意されていますので、ジャンパーカットで簡単に分離することができます。 |
| モータ出力 |
DCモータ用(PWM、正反転)×2(2Amax)
汎用(on/offのみ)×1 |
| 入出力ポート |
AD×3、デジタル×2(出荷時のコネクタ構成です。) |
| プログラム環境 |
TiColla |
| 大きさ |
100×65×15mm |
|
|
|
|